Amerikkalainen tutkimusryhmä on onnistuneesti kehittänyt pienimmän koskaan luodun itsenäisen robotin. Se on pienempi kuin suolajyvä ja voi uida veden alla useita kuukausia ravintona pelkästään valoa.
Sisältö
Vaikka elektroniikka on viime vuosikymmeninä pienentynyt yhä enemmän, itsenäiset robotit eivät ole vielä onnistuneet ylittämään 1 mm:n rajaa. Tämä johtuu siitä, että pienet kädet ja jalat ovat hauraita ja vaikeita valmistaa. Lisäksi mikroskooppisessa maailmassa fysiikan lait muuttuvat: painovoiman ja inertian sijaan vallitsevat vastus ja viskositeetti.
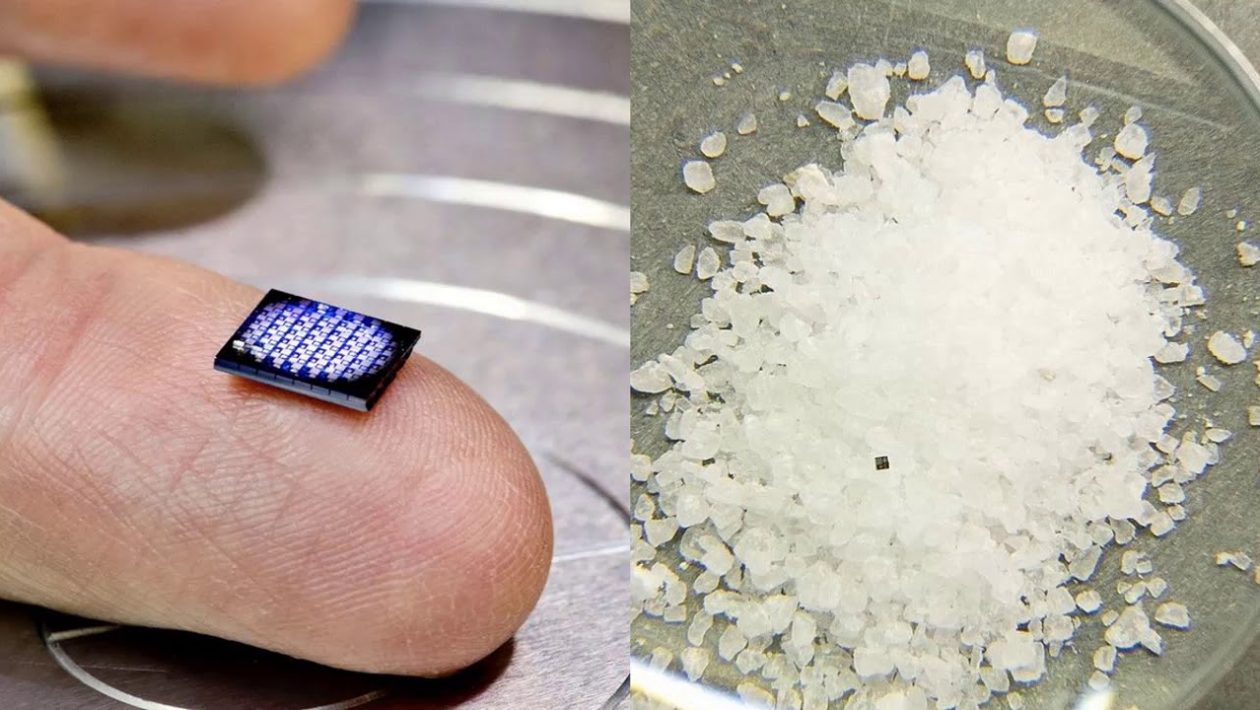
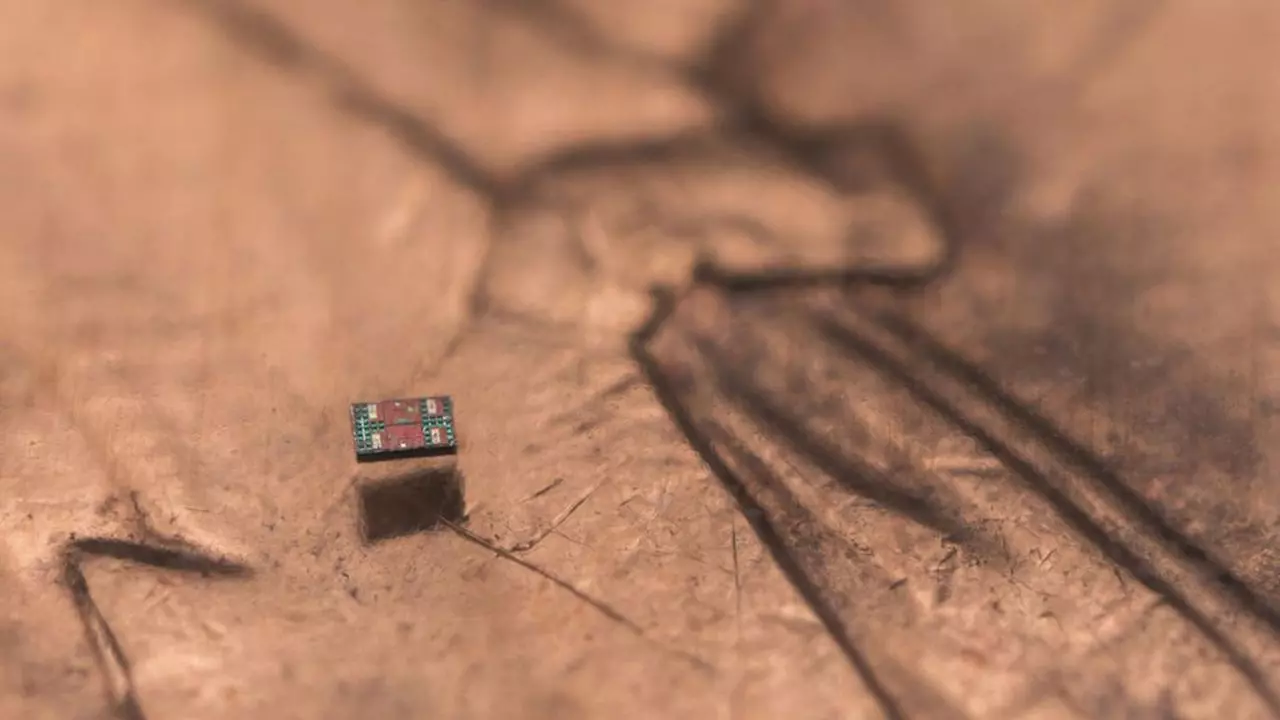
Tätä taustaa vasten amerikkalaiset tutkijat ovat julkistaneet tutkimustulokset, joiden avulla on onnistuttu ratkaisemaan 40 vuotta kestänyt ongelma. Uusi robotti, jonka on kehittänyt yhteistyöryhmä Pennsylvanian yliopistosta ja Michiganin yliopistosta , on kooltaan vain 200 × 300 × 50 mikrometriä, mikä tekee siitä pienemmän kuin suolajyvänen. Siitä huolimatta se kykenee havaitsemaan ympäristöään, tekemään itsenäisiä päätöksiä, uimaan ja liikkumaan veden alla.
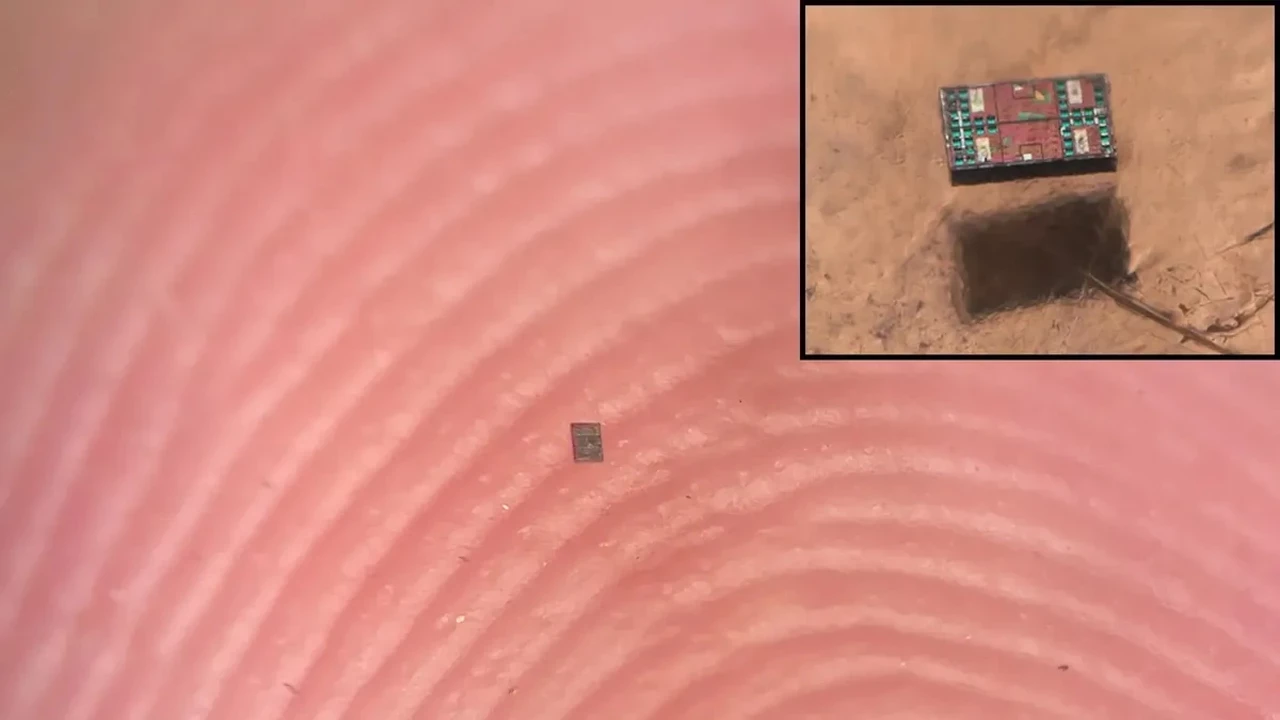
Robotti on pienempi kuin suolajyvä. Se pystyy havaitsemaan ympäristönsä, tekemään itsenäisiä päätöksiä ja uimaan veden alla.
Lisäksi se ei ole riippuvainen mistään ulkoisista ohjausvälineistä, kuten kaapeleista tai magneettikentistä, ja on täysin itsenäinen. Sen tuotantokustannukset ovat arviolta vain yksi sentti kappaleelta.
”Olemme onnistuneet pienentämään autonomisen robotin koon 1/10 000:een tavallisen robotin koosta. Tämä avaa uusia mahdollisuuksia ohjelmoitaville roboteille”, selittää Mark Miskin, Pennsylvanian yliopiston apulaisprofessori ja sähkötekniikan asiantuntija.
European Tech Insights 2025 -raportissa paljastetaan mannermainen paradoksi: kansalaiset vaativat digitaalista suvereniteettia ja puolustusmenojen lisäämistä, mutta valtaosa heistä torjuu tekoälyn vaikutuksen työhönsä, lastensa koulutukseen tai talouteensa.
Sähköisten kenttien luoma liike.
Miskin ja hänen tiiminsä kehittämä liikesysteemi haastaa perinteisen robotiikan teorian. Kalat ja muuteteenpäin työntämällä vettä taaksepäin Newtonin kolmannen liikkeen lain mukaisesti. Mutta veden työntäminen mikroskooppisessa mittakaavassa on kuin paksun hartsin työntämistä: viskositeetti on liian suuri, jotta pienet kädet ja jalat voisivat voittaa sen.
Siksi tutkijat sovelsivat täysin uutta lähestymistapaa. Sen sijaan, että liikuttaisi ruumiinosiaan uidakseen, tämä robotti liikkuu luomalla ympärilleen sähkökentän, joka työntää varattuja hiukkasia nesteessä. Nämä liikkuvat hiukkaset vetävät mukanaan lähellä olevia vesimolekyylejä ja luovat virtauksen robotin ympärille. Se on samanlainen kuin meren tai joen liike, mutta ilman robotin suoraa liikettä.
Robotti saa virran LED-valoista ja voi kulkea kehonsa pituisen matkan enintään sekunnissa. Liikkumissuuntaa voidaan muuttaa säätämällä sähkökenttää, mikä mahdollistaa monimutkaisten reittien seuraamisen tai ryhmissä liikkumisen, kuten kalaparvi.
Tämän liikkumistavan tärkein etu on sen poikkeuksellinen kestävyys, koska siinä ei ole liikkuvia osia. Miskin mukaan mikro-pipettien toistuvien liikkeiden jälkeen ei havaittu vaurioita. Päinvastoin, tutkijat väittävät, että se voi uida keskeytyksettä useita kuukausia.
Maailman pienin
Pelkkä liikkumiskyky ei riitä todellisen autonomian saavuttamiseen. Autonomisten robottien on tunnistettava ympäristöään, tehtävä päätöksiä ja hankittava itselleen ravintoa. Kaiken tämän on mahtuttava alle 1 mm:n kokoiselle sirulle. David Blaun tutkimusryhmä Michiganin yliopistosta ryhtyi ratkaisemaan tätä ongelmaa.
Blau ja hänen tiiminsä tekivät ennätyksen luomalla maailman pienimmän robotin. Kun he tapasivat Miskin DARPA:n (Defense Advanced Research Projects Agency) esittelyssä, he vakuuttuivat siitä, että heidän teknologiansa täydentävät toisiaan täydellisesti. Tämän idean toteuttaminen kesti viisi vuotta.
Heidän muistelmansa mukaan suurin este oli energia. Robottiin asennetut aurinkopaneelit tuottavat vain 75 nanowattia. Se on alle sadasosa älykellon kuluttamasta energiasta. Tämän ongelman ratkaisemiseksi tutkimusryhmä kehitti uuden erityisen piirin, joka toimii erittäin alhaisella jännitteellä.
Lisäksi vakava ongelma oli tilan rajallisuus. Aurinkopaneelit veivät suurimman osan pinnasta, jättäen vain vähän tilaa tietokoneinfrastruktuurille. Siksi tutkijat uudistivat radikaalisti ohjelman, joka vaati paljon ohjeita, ja tiivistivät sen yhdeksi erityiseksi ohjeeksi, joka mahtui robotin rajalliseen muistiin.
Robotteja voitiin valmistaa useita satoja kappaleita kerrallaan. Sitten ne toimivat itsenäisesti ohjelman mukaisesti.
Kuinka tieto välitetään?
Robotti on varustettu elektronisilla antureilla, jotka pystyvät havaitsemaan pienimmätkin lämpötilan muutokset. Robotti on kuitenkin mikroskooppisen pieni, joten tarvittiin mekanismi lukemien välittämiseen. Ohjelmoimalla anturit koodaamaan lukemat ”tanssiviksi värähtelyiksi”, tutkijat loivat alkuperäisen viestintätavan käyttämällä mikroskooppia ja kameraa robotin liikkeiden seuraamiseen ja tietojen dekoodaamiseen. ”Se on hyvin samanlaista kuin mehiläisten keskinäinen viestintä”, Blau selittää.
Lisäksi jokaisella robotilla on yksilöllinen tunniste, ja se on tarkoitettu välittämään erilaisia ohjeita eri lohkoille. Tämä tarkoittaa, että useat robotit voivat suorittaa erilaisia tehtäviä, kun ne yhdessä suorittavat suuria tehtäviä.
Tutkimusryhmän mukaan tämä on ensimmäinen kerta, kun täysimittainen tietokone, mukaan lukien prosessori, muisti ja anturit, on asennettu alle 1 mm:n kokoiselle robotille. Nämä mikrorobotit toimivat mikro-organismien kokoluokassa, mikä voi olla hyödyllistä esimerkiksi lääkäreiden suorittamassa yksittäisten solujen seurannassa tai insinöörien suorittamassa pienten laitteiden kokoonpanossa.

Tutkijat ovat osoittaneet, että he voivat asentaa tietokoneita ja antureita niin pienelle kohteelle, että se on lähes näkymätön, ja pitää sen toiminnassa useita kuukausia. Miskin on varma, että tämä on vasta alkua, saavutus, joka avaa uusia mahdollisuuksia mikrorobotiikalle.



